引言
在学习机器学习的过程中,我们总是避不开优化问题,而且这些问题常常没有解析解。而在计算机算力不断增强的今天,迭代算法由于其计算的重复性和可并行性渐渐受到欢迎。这里我们会简单描述几种常见的迭代优化算法。
梯度下降法
引入
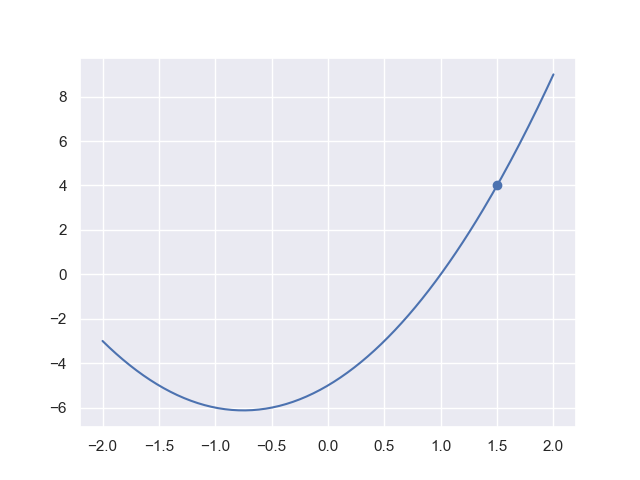
我们先从$\mathbb{R}$上的函数说起,
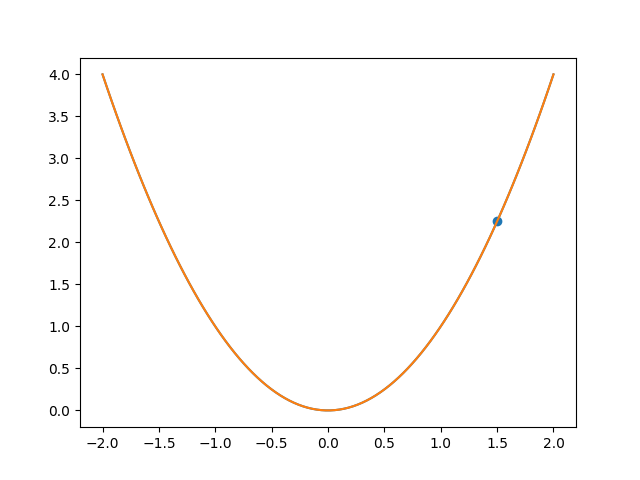 假设我们正处于$(1.5,2.25)$处,如果我们想要到达最小值点,那么必然是向下走,这里的“下”其实就是导数为负的意思,这就是梯度下降法的朴素思想:如果一个函数是凸函数,那么我们可以不断“向下跑”得到。
假设我们正处于$(1.5,2.25)$处,如果我们想要到达最小值点,那么必然是向下走,这里的“下”其实就是导数为负的意思,这就是梯度下降法的朴素思想:如果一个函数是凸函数,那么我们可以不断“向下跑”得到。
由于计算机无法处理连续态下的问题,所以下降只能通过离散化的不断迭代实现:我们制定一个步长$\eta$,不断循环
\[x^{(k+1)}\gets x^{(k)}+\eta f'(x^{(k)})\]直到$f(x^{(k+1)})=f(x^{(k)})$,或者宽容一点,$\vert f(x^{(k+1)})-f(x^{(k)})\vert\lt\epsilon$.
对上面这个例子去进行“导数”下降:
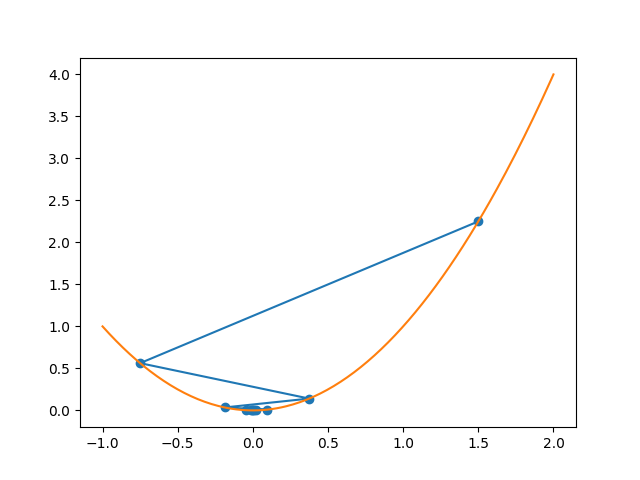 我们选取了较大的步长$(0.75)$,因此会产生振荡,但最后到达了极值点附近。
我们选取了较大的步长$(0.75)$,因此会产生振荡,但最后到达了极值点附近。
真正的梯度下降
我们刚才只能算是“导数下降”,但梯度下降也就是将$\mathbb{R}$上函数扩展到$\mathbb{R}^n$,正如梯度就是导数在多维欧几里得空间的推广:
\[f'(x^{(k)})=\dfrac{\mathrm{d}f}{\mathrm{d}x}\bigg|_{x=x^{(k)}}\longrightarrow\nabla f(x^{(k)})=\begin{bmatrix} \dfrac{\partial f}{\partial x_1}\\ \vdots\\ \dfrac{\partial f}{\partial x_n}\\ \end{bmatrix}_{x=x^{(k)}}\]可以证明,梯度向量的方向是函数下降速度最快的方向。我们尝试对二元函数$f(x_1,x_2)=x_1^2+x_2^4$进行梯度下降求解,容易知道其梯度
\[\nabla f(x_1,x_2)=\begin{bmatrix} 2x_1\\\\4x_2^3 \end{bmatrix}\]import matplotlib.pyplot as plt
import numpy as np
# 初始点设置为(4, 3)
x1 = [4]
x2 = [3]
eta, epsilon = 0.01, 1e-10
f = lambda x1, x2 : x1**2 + x2**4
while True:
x1k, x2k = x1[-1], x2[-1]
der1, der2 = 2 * x1k, 4 * x2k**3
x1k_new = x1k - eta * der1
x2k_new = x2k - eta * der2
x1.append(x1k_new)
x2.append(x2k_new)
if abs(f(x1k_new, x2k_new) - f(x1k, x2k)) < epsilon:
break
效果如下
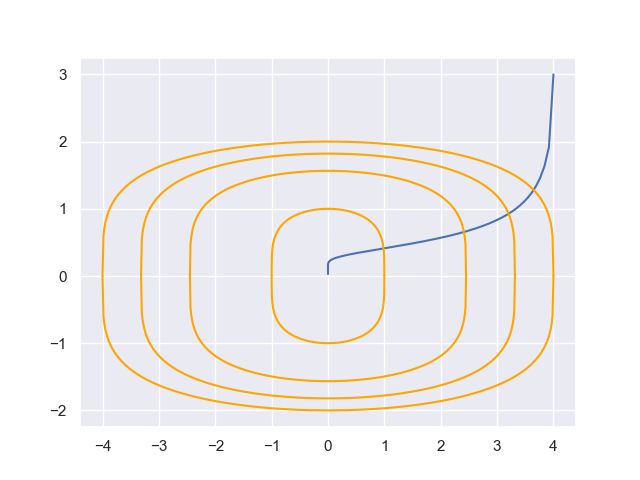
其中黄色部分为函数等高线$x_1^2+x_2^4=k$.
缺陷
我们前面提到过,当目标函数是凸函数时,梯度下降法得到的确实是全局最优解;而一般情况下不保证是全局最优的,比如下图:
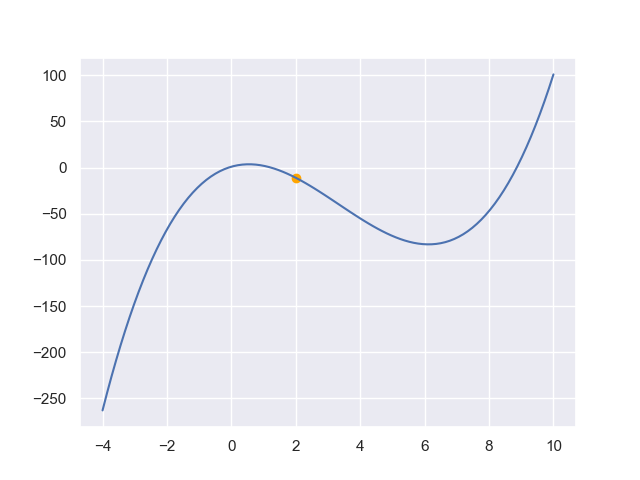
此外,梯度下降的收敛速度也不是很快.
牛顿法
和梯度下降类似,牛顿法也是求解无约束优化问题常用的迭代算法,拥有下降速度快的特点。事实上牛顿法原本是用来近似求解方程的方法,因此我们从它最根本的目的开始
从低维情况开始
这里我们从简单的$\mathbb{R}$上二次函数$y=2x^2+3x-5$说起:
我们现在处于$(x_0,y_0)=(1.5,4)$的位置,我们想找到$y=0$的解。类似于梯度下降,我们也可以不断向解所在的方向行走直到到达解的位置。显然,行走方向由点所处的位置决定:
\[\begin{cases} f(x_0)>0,f'(x_0)>0:向左走\\ f(x_0)>0,f'(x_0)<0:向右走\\ f(x_0)<0,f'(x_0)>0:向右走\\ f(x_0)<0,f'(x_0)<0:向左走\\ \end{cases}\]或许大家会想到类似这样的迭代公式:
\[x_{k+1}\gets x_k-\dfrac{f(x_k)}{f'(x_k)}\]恰好能符合上面的移动规则,而这就是牛顿法:它首先作一条过$(x_0,f(x_0))$的切线:
\[y=f'(x_0)(x-x_0)+f(x_0)\]得到其零点:
\[x = x_0-\dfrac{f(x_0)}{f'(x_0)}\]这种方法符合上面的移动规则,从而达到逼近方程零点的目的:
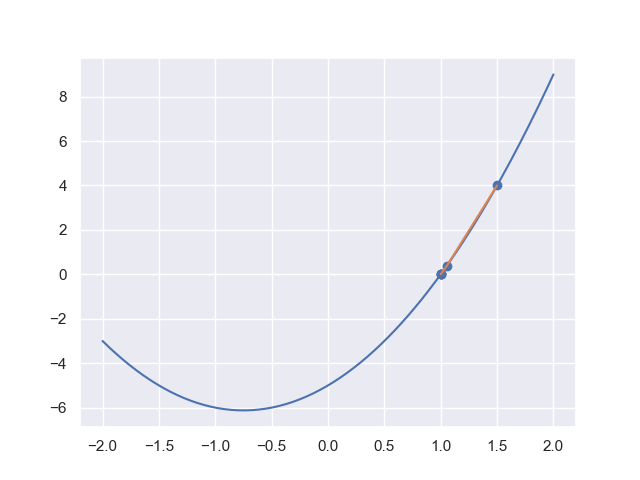 可以发现它很快逼近了零点$x=1$. 那么牛顿法是如何将求零点和最优化联系起来的呢?这里我们有高等数学的一个定理:可微函数的极值点必是驻点(驻点就是导函数零点)。这启发我们,通过牛顿法寻找导函数$f’(x)$的零点,进而得到极值点。
可以发现它很快逼近了零点$x=1$. 那么牛顿法是如何将求零点和最优化联系起来的呢?这里我们有高等数学的一个定理:可微函数的极值点必是驻点(驻点就是导函数零点)。这启发我们,通过牛顿法寻找导函数$f’(x)$的零点,进而得到极值点。
我们对$f(x)$进行$x_0$附近的泰勒展开:
\[f(x)=f(x_0)+f'(x_0)(x-x_0)+\dfrac{1}{2}f''(x_0)(x-x_0)^2\]当$f’(x)=0$,对上式求导,我们有
\[0=f'(x_0)+f''(x_0)(x-x_0)\]进而
\[x=x_0-\dfrac{f'(x_0)}{f''(x_0)}\]与上面的求解方程的牛顿法形式相同。我们知道泰勒公式的等号只有在$x\to x_0$时才成立,当$x$与$x_0$误差较大时,$f’(x_0-\dfrac{f’(x_0)}{f’‘(x_0)})\neq0$,但我们知道$x_0-\dfrac{f’(x_0)}{f’‘(x_0)}$与$x_0$相比更加接近我们的目标,于是将该式迭代使用。
我们还是用四次函数$y=x^4-x^3+x^2-x+1$作为例子,但这次是去求解极值点:
x_list =[-2] # 初始点设-2
f = lambda x : x**4 - x**3 + x**2 - x + 1
df = lambda x : 4*x**3 - 3*x**2 + 2*x - 1
d2f = lambda x : 12*x**2 - 6*x + 2
epsilon = 1e-10
while True:
xk = x_list[-1]
xk_new = xk - df(xk) / d2f(xk)
x_list.append(xk_new)
if abs(df(xk_new)) < epsilon:
break
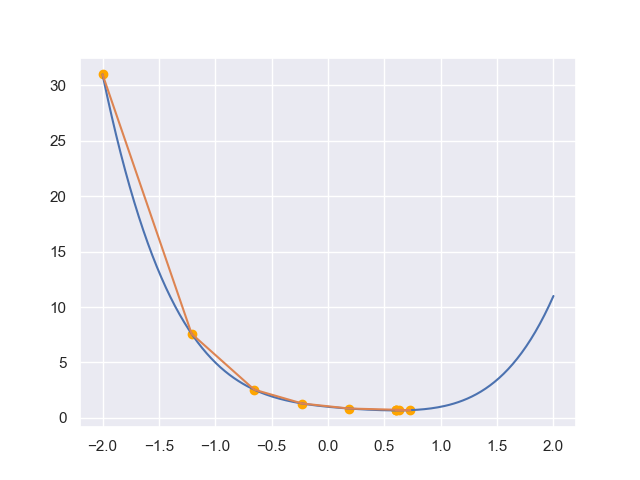 可以发现通过牛顿法我们可以更快逼近极值点.
可以发现通过牛顿法我们可以更快逼近极值点.
$\mathbb{R}^n$下的牛顿法
我们只需要写出$n$维情况下的展开,便可以得到牛顿法的广义形式:
\[f(x)=f(x_0)+\nabla f(x_0)(x-x_0)+\dfrac{1}{2}(x-x_0)^\top H(x_0)(x-x_0)\]其中$H(x_0)$是一个$n$阶矩阵,其中每个元素满足
\[H(x_0)_{ij}=\dfrac{\partial^2f}{\partial x_i\partial x_j}\bigg|_{x=x_0}\]称作黑塞矩阵。由偏导数性质,当函数连续,偏导数与求导顺序无关,因此$H$是对称矩阵。若$\nabla f(x)=0$,对上式求导则有
\[0=\nabla f(x_0)+H(x_0)(x-x_0)\]从而得出$n$元函数下的牛顿法迭代公式:
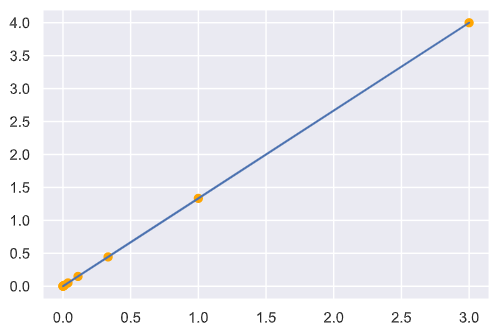
\[x=x_0-{H(x_0)}^{-1}{\nabla f(x_0)}\]我们对函数$f(x_1,x_2)=\dfrac{1}{4}(x_1^4+2x_1^2x_2^2+x_2^4)$进行牛顿法测试求极值点:
# %%
import numpy as np
f = lambda x1, x2: (x1**4 + 2 * x1**2 * x2**2 + x2**4) / 4
df = lambda x1, x2: np.array([
[x1**3 + x1 * x2**2],
[x2 * x1**2 + x2**3],
])
d2f = lambda x1, x2: np.array([
[3 * x1**2 + x2**2, 2 * x1 * x2],
[2 * x1 * x2, x1**2 + 3 * x2**2],
])
# 起始点(3, 4)
x1 = [3]
x2 = [4]
epsilon = 1e-10
while True:
x1k, x2k = x1[-1], x2[-1]
x_new = np.linalg.inv(d2f(x1k, x2k)) @ df(x1k, x2k)
x1k_new, x2k_new = x_new.T[0]
print(x1k_new, x2k_new)
x1.append(x1k_new)
x2.append(x2k_new)
new_gradient = df(x1k_new, x2k_new)
if np.sum(new_gradient) / 2 < epsilon:
break
结果如下:
 迭代坐标:
迭代坐标:
3 4
0.9999999999999999 1.3333333333333333
0.33333333333333337 0.4444444444444443
0.11111111111111109 0.1481481481481481
0.03703703703703703 0.049382716049382706
0.012345679012345673 0.016460905349794237
0.004115226337448557 0.0054869684499314125
0.0013717421124828525 0.0018289894833104707
0.0004572473708276174 0.0006096631611034901
0.00015241579027587248 0.00020322105370116335
迭代速度很快,但注意到我们每次都需要求解一次矩阵的逆,计算较为复杂,由此引入下面的拟牛顿法。
拟牛顿法
我们希望能找到一个黑塞矩阵的逆的替代矩阵,这就是拟牛顿法的基本思想。先来看看牛顿法迭代中黑塞矩阵满足的条件,当我们位于$x_0$时,下一步迭代要到达的$x$满足泰勒展开式
\[f(x)=f(x_0)+\nabla f(x_0)(x-x_0)+\dfrac{1}{2}(x-x_0)^\top H_0(x-x_0)\]对$x$求导,整理:
\[\nabla f(x)-\nabla f(x_0)=H_0(x-x_0)\]记$y_k=\nabla f(x^)-\nabla f(x^{(k)}),\delta_k=x^{(k+1)}-x^{(k)}$,则
\[y_k=H_k\delta_k\text{ or }H_k^{-1}y_k=\delta_k\]上式便称作拟牛顿条件. 如果$H_k$正定,那么我们可以保证牛顿法搜索方向(也就是$x^{(k)}$的变化方向,$H^{-1}\nabla f$)是下降的,由此我们可以在保证方向正确的条件下步数更小地迭代:
\[x\gets x-\lambda H_k^{-1}g_k\]将上面迭代关系式代入二阶泰勒展开式(用$g_k$代表$\nabla f(x^{(k)})$):
\[\begin{aligned} f(x_1) &=f(x_0)+\nabla f(x_0)(x-x_0)+\dfrac{1}{2}(x-x_0)^\top H_0(x-x_0)\\ &=f(x_0)-\lambda g_0^\top H_0^{-1}g_0+\dfrac{1}{2}\lambda^2g_0^{\top}H_0{-1}g_0\\ &=f(x_0)+(\dfrac{1}{2}\lambda^2-\lambda)g_0^\top H_0^{-1}g_0\\ \end{aligned}\]由于$H_k$是正定矩阵,$H_k^{-1}$自然也时,因此二次型$g_k^\top H_k^{-1}g_k\geqslant0$,从而当$\lambda$为一个充分小的正数时,$f(x_1)<f(x_0)$,也就是说迭代方向确实是向着“下坡”的方向.
在拟牛顿法中将$G_k$作为$H_k^{-1}$的近似,则要求$Gk$:①每次迭代$G_k$正定;②满足拟牛顿条件:
\[G_{k+1}y_k=\delta_k\]根据拟牛顿条件选择$G_k$作为$H_k^{-1}$的近似或选择$B_k$作为$H_k$的近似的算法乘坐拟牛顿法。
根据拟牛顿条件,在每次迭代中需要更新矩阵$G_{k+1}$:
\[G_{k+1}=G_k+\Delta G_k\]更新方法的不同导致了拟牛顿法的多种实现。
具体的实现算法
下面介绍的都是Broyden类拟牛顿法.
DFP算法
假设上面的矩阵迭代由$G_k$加上两个附加项构成:
\[G_{k+1}=G_k+P_k+Q_k\]为满足拟牛顿条件,我们需要找到合适的$P_k,Q_k$使得
\[G_{k+1}y_k=G_ky_k+P_ky_k+Q_ky_k=\delta_k\]因此我们可以使$P_k,Q_k$满足:
\[\begin{cases} P_ky_k=\delta_k\\ Q_ky_k=-G_ky_k\\ \end{cases}\]一个可满足的$P_k,Q_k$:
\[\begin{cases} P_k=\dfrac{\delta_k\delta_k^\top}{\delta_k^\top y_k}\\ Q_k=-\dfrac{G_ky_ky_k^\top G_k}{y_k^\top G_ky_k} \end{cases}\]这样就有能得到迭代公式:
\[G_{k+1}=G_k+\dfrac{\delta_k\delta_k^\top}{\delta_k^\top y_k}-\dfrac{G_ky_ky_k^\top G_k}{y_k^\top G_ky_k}\]正式的算法如下:
$\textbf{function }\text{DFP}(f, \varepsilon,x,G)\textbf{ returns }x^\star:$
$\quad g\gets\nabla f(x)$
$\quad\textbf{if }|g<\varepsilon|$
$\qquad x^\star\gets x$
$\qquad\textbf{return }x^\star$
$\quad\textbf{while }\text{True}$
$\qquad p\gets -Gg$
$\qquad \lambda\gets\mathop{\arg\min}\limits_{\lambda\geqslant 0}f(x+\lambda p)$
$\qquad x\gets x+\lambda p$
$\qquad g\gets\nabla f(x)$
$\qquad\textbf{if }|g|\leqslant\varepsilon$
$\qquad\quad\textbf{break}$
$\qquad G\gets G+P+Q$
$\textbf{return }x$
BFGS算法
BFGS是目前最流行的拟牛顿法,它采取了和上面不一样的思路:通过近似$H_k$得到$B_k$并迭代。它也要满足拟牛顿条件:
\[B_{k+1}\delta_k=y_k\]而$B_k$和$B_{k+1}$的迭代使用的是和上面类似的方法:
\[B_{k+1}=B_{k}+P_{k}+Q_{k}\]找打合适的$P_k,Q_k$,得到矩阵的迭代公式:
\[B_{k+1}=B_{k}+\dfrac{y_ky_k^\top}{y_k^\top\delta_k}-\dfrac{B_k\delta_k\delta_k^\top B_{k}}{\delta_k^\top B_k\delta_k}\]BFGS算法过程和上面类似,唯一的不同就是上面是根据$p=-Gg$求出,这里是通过方程$Bp=-g$求出.
Broyden类算法
我们可以用BFGS中$B_k$的迭代得到相应$G_k$的迭代公式(计算过程较难,省略):
\[G_{k+1}=\bigg(I-\dfrac{\delta_ky_k^\top}{\delta_k^\top y_k}\bigg)G_k\bigg(I-\dfrac{\delta_ky_k^\top}{\delta_k^\top y_k}\bigg)^\top+\dfrac{\delta_k\delta_k^\top}{\delta_k^\top y_k}\]成为BFGS算法关于$G_k$的迭代公式. 考虑到两种算法得到的$G$都符合拟牛顿条件,我们将两种算法导出的$G_{k+1}$记为$G^{\text{DFP}}$和$G^{\text{BFGS}}$,它们的线性组合
\[G_{k+1}=\alpha G^{\text{DFP}}+(1-\alpha)G^{\text{BFGS}}(0\leqslant\alpha\leqslant1)\]也满足拟牛顿条件,而且是正定的,这样我们就得到了一系列拟牛顿法,称为$\text{Broyden}$类算法.